

カウンター
Mデバイスに次によく使うデバイスがタイマー、カウンターです。
タイマーは、時間軸を遅らせて、何かをするためのデバイスです。
タイマーのパラメーターは以下のようになっています。

特別なことが無い限り、デフォルトで使用しますので、ここでは低速タイマーとなります。
すなわち、1桁目の単位が100msとなるので、k100とは10.0secとなります。
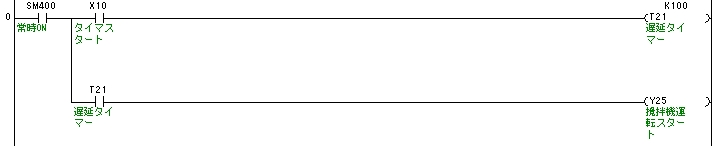
ラダー回路では、
X10のスタート信号が入れば、T21がスタートします。
K100後タイムアップとなります。
T21がタイムアップするとY25が出力します。
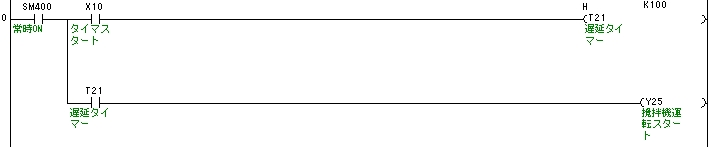
ちなみに高速カウンターにすると以下のようになり
k100とはデフォルトだと低速の1/10になるので、k100とは1.00secとなります。
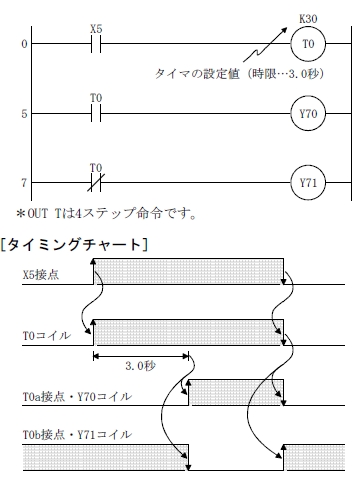
タイマーとタイムチャート
スポンサーリンク *****************
・タイマ接点はコイル励磁後,設定時間だけおくれて動作します。(オンディレタイマ)
・タイマの設定値は,K1~K32767です。
低速(100ms)タイマ0.1~3276.7秒
高速(10ms)タイマ0.01~327.67秒
・タイマの設定値が0のときは,命令実行でON(タイムアップ)します。
タイマーの設定値は間接指定もできます。
設定値のK***をDレジスタにすることで、Dの値を任意の設定値にすることが出来ます。
例えば
K100の設定をするならば、Dレジスタの中にk100の数値を転送すればいいだけです。
【 MOV K100 D**** 】となります。
応用例は
X001 が ON の時 k100 を D****に転送
X002 が ON の時 k200 を D****に転送
X003 が ON の時 k300 を D****に転送
というように条件が変わる事によりタイマー設定値も帰る事が出来ます。
カウンター
カウンターは何かの信号を受けて、1カウントづつ数値を加算していくことです。
そして、新たにカウントするときは、今までカウントしていた数値をリセットする必要があります。
カウンターとタイムチャート
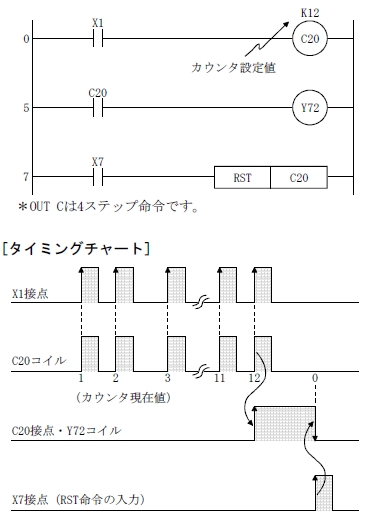
・カウンタは入力信号の立上がりで,カウントします。
・カウントアップ後は,入力信号があってもカウントしません。
・一度カウントアップしますと,RST命令が実行されるまで接点の状態,現在値(カウンタ
のカウント値)は変化しません。
・カウントアップ前にRST命令が実行されると,現在値は0にもどります。
・カウンタの設定値はK1 ~K32767です。(K0は命令実行でON(カウントアップ)します。)
カウンターもタイマーと同様に間接指定が出来ます。
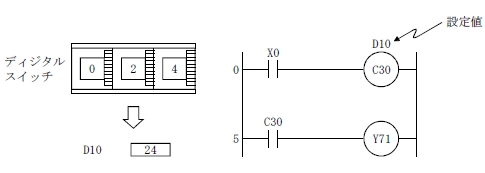
・カウンタC30は,入力信号X0がデータレジスタD10の内容(例えば24)と同数だけONするとカウントアップします。
・外部のディジタルスイッチで指定した値を,カウンタの設定値としたいときに便利です。